
2021年度 二輪車の8の字走行解析システム開発 補助事業について
機械・制御系 平澤研究室では,公益財団法人JKAの補助事業に採択いただき,2021年度より『二輪車の8の字走行解析システム開発』をテーマに研究を進めています.このページでは,2021年度から2022年度の2年間の研究成果について,報告いたします.
1 研究の概要
自動二輪車(オートバイやスクーター)の運動を計測するための新しいシステムを提案しています.「スマートパイロン」と名付けた本システムは,周囲360°を撮影できる全天球カメラという特殊なカメラを2台用いて,画像処理技術により自動二輪車の運動を非接触で,一定の精度で計測することが可能です.この手法では,自動二輪車やライダーの側に特別な改造をほどこす必要はありませんし,重い計測装置を車体に搭載する必要もありません.実際に試作した計測装置と実車両を用いた走行実験を行い,計測した結果を確認するとともに,さらなる精度向上を求めて装置に改良を加えています.下の図1は,研究の当初に提案するシステムをイメージしたものです.
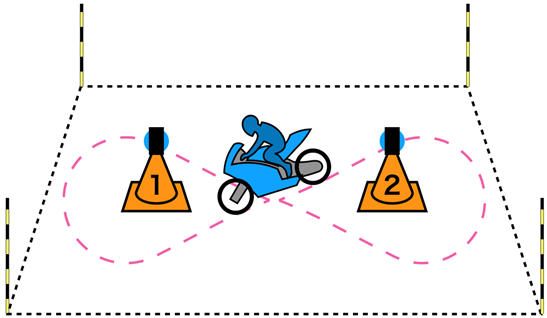
図1 提案する「スマートパイロン」計測システム
2 研究の目的と背景
自動二輪車は便利で,かつ操縦することが楽しい乗り物です.四輪の自動車に比べると環境への負荷も小さく,SDGsの観点からも見直されています.しかし,四輪の自動車で自動運転といった革新的な技術が市販車両にも導入されはじめていることを考えると,自動二輪車についても,もっと研究が進み,運動のメカニズムが明らかにされることが期待されている,と言うことができるでしょう.
自動二輪車は危険な乗り物ではありませんが,残念ながら自動二輪車の運転中に交通事故に遭うライダーの方が一定数いらっしゃるのも事実です.工業製品としての自動二輪車の安全性を高めることも大切ですが,ライダーが自動二輪車の運動をよく理解し,また自分自身の技量を知って,安全な運転に活かすことも重要です.
本研究で提案する「スマートパイロン」では,一般のライダーの方が駐車場程度の空きスペースに簡単に設置し,いわゆる8の字走行を行うことで,そのライダーの技量を評価し,より安全な操作をアドバイスできるようなシステムを目指しています.この目的を実現するために,まず第一に画像処理から自動二輪車の位置をなるべく正確に計測する手法を開発することが必要となります.現時点では,実際に装置を試作し,計測実験を繰り返すことで精度を確認するとともに,明らかになった問題点に対し装置に改良を加えている段階です.
3 研究内容
(1)計測装置「スマートパイロン」の設計・試作
まずは,研究目的に適したカメラを選ぶところから始めました.一般的なカメラをカーブの中心に置いて,走行する自動二輪車に合わせて首を振って追いかけるような装置も考えましたが,システムが複雑で精度よく計測することが難しいと予想されました.そこで周囲360°を撮影できる全天球カメラに着目し,小型で動画が撮影できる製品を選定しました.まずは屋内で撮影を行い,カメラの特性を確認しました.図2は実際に撮影した画像であり,図2(1)はカメラの高さ1メートルで撮影したもの,図2(2)はカメラの高さ0.5メートルで撮影したものとなります.画面上の黄色の点は,画像処理ソフトを用いて特徴点を手動でマーキングした点になります.
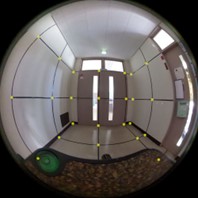
(1) カメラ設置高さ1.0[m]

(2) カメラ設置高さ0.5[m]
図2 全天球カメラの画像
画面上の座標から実際の空間上の座標を計算して,精度を確認しました.レンズの特性で画像はゆがんでいますが,カメラとの相対角度はかなり正確なことが分かりました.以上の内容について学会において,口頭発表1件を行いました.
平澤順治,『画像処理による二輪車の運動計測に関する研究』,日本機械学会第30回交通・物流部門大会(TRANSLOG2021),PS2-10,2021年.
(リンク先はJ-STAGE書誌情報のページです.)
自動二輪車に向けるのではなく,光軸を下向きに設置することで角度情報を精度よく求める手法に切り替えました.カメラの位置を正確に設置するために,アルミフレームを用いてしっかりした土台を作成,特殊な形状のアタッチメントも設計・製作し「スマートパイロン」の最初の試作となりました.下の図3は,試作した「スマートパイロン」の概要を表したものです.

図3 試作したスマートパイロン(初期型)
(2)「スマートパイロン」を用いた走行実験の実施
試作した「スマートパイロン」を用いて走行実験を行いました.2021年度はコロナ禍と半導体不足により自動二輪車の入手が難しい時期でしたので,2021年11月の最初の走行実験では,まずは自転車を用いて基本的なデータを集め,装置の妥当性を確認しました.翌12月の末にやっと自動二輪車が入手できましたので,2022年1月,自動二輪車を用いた走行実験を行うことができました.
図4は「スマートパイロン」の配置と,対象点の位置の計算手法を示したものです.左右のカメラの映像を取り違えることがないよう,スマートパイロンはそれぞれ緑色と赤色のものを選び,明確に色の異なるものを使用しています.図5はこの実験で実際に撮影された画像の一例です.自動二輪車の前輪中心が,カメラ基線(カメラの中心と中心を結んだ線)を通過する瞬間に撮影されたものです.

図4 スマートパイロンの配置

(1) カメラ1からの画像

(2) カメラ2からの画像
図5 走行実験で得られた全天球カメラの画像
この走行実験で得られた知見をまとめ,学会において口頭発表1件を行いました.この発表は後に,査読付き論文としてお認めいただき,論文誌に掲載されました.
平澤順治,『二輪車の位置計測のための全天球カメラの活用』,自動車技術会論文集,Vol.54,No.1.pp.21-28,2023年(2022年自動車技術会春季学術講演会において発表).
(リンク先はJ-STAGE書誌情報のページです.PDFのダウンロードが可能です.)
図6は,この論文で公開している,8の字走行の走行軌跡です.1秒毎の,ライダーのヘルメットの位置を図4の位置関係から計算し,グラフに表したものです.

図6 8の字走行軌跡
図6から,ライダーの左回りと右回りで「くせ」があることが見てとれます.ライダーは平澤本人で,入手したばかりの実験車両の運転に慣れていないことが理由として考えられますが,逆に言えばライダーが「へたっぴ」なことがデータとして計測できた,とも言えます.研究の目的である,ライダーの技量を評価するシステムとして応用できる可能性が確認できたものと考えています.
走行実験の結果を詳細に検討し,スリットによる位置合わせが不要なことが確認できたため,カメラの取り付け方法を透明なアクリルパイプを用いたものに変更しました.この改良したスマートパイロンを用いて,2022年の8月,9月,11月に走行実験を行うことができました.スリットが無くなったことにより,カメラ基線の近くでより詳しく計測することができましたが,誤差が極端に大きくなってしまうことも分かりました.図7は,改良したスマートパイロンの外観を撮影した写真です.

図8 スマートパイロン(改良型)
これらの知見をまとめ,学会において口頭発表1件を行いました.
平澤順治,『全天球画像を用いた二輪車の8の字走行軌跡の計測』,自動車技術会秋季学術講演会講演予稿集,20226154,No.117-22,2022年.
(リンク先は自動車技術会の書誌情報のページです.)
4 本研究が実社会にどう活かされるか―展望
研究で提案する計測手法は,シンプルで誰にでも使いやすいシステムの実現を目指しています.走行実験を繰り返すことにより,明らかになった問題点もありますが,誤差の特性を明らかにすることができれば現実的な対策もとれるものと考えています.提案するシステムが製品として実用化できれば,広く一般の二輪車ユーザーに使っていただき,一人一人の運転技量の確認や向上に活用していただけるものと期待しています.
平澤研究室は2023年度からも公益財団法人JKAの補助を受け,自動二輪車に関する研究をさらに進めてまいります.研究へのご理解とご支援に,この場を借りて感謝申し上げます.


